#include <ArticulatedLink.h>
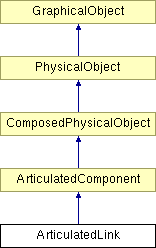
Inheritance diagram for ArticulatedLink:
Definition at line 24 of file ArticulatedLink.h.
|
|
Definition at line 14 of file ArticulatedLink.cpp. References deltaThetaMax, eta, k, motorTorque, parentLink, theta, theta0, theta0Max, theta0Min, thetaD, thetaDD, and torqueContact. |
|
|
Definition at line 30 of file ArticulatedLink.cpp. |
|
|
Computes the torque and force that acts on the link (from IStar and betaStar), for the quasistatical physics case. Definition at line 69 of file ArticulatedLink.cpp. References force, Matrix3::getElement(), Vector2::rotate(), Vector2::setToZero(), Vector3::x, Vector2::x, Vector2::y, Vector3::y, and Vector3::z. Referenced by ArticulatedAgentQuasistatic::computeForces(), and ArticulatedAgentQuasistatic::computeTotalForces(). |
|
|
Computes the motor torque, given theta and (target theta) theta0, as an elastic torque. Definition at line 45 of file ArticulatedLink.cpp. References k, motorTorque, and theta. Referenced by ArticulatedAgentQuasistatic::forwardKinematics(). |
|
|
Updates the values of sin, cos, sin2, cos2, sinCos as a function of theta Definition at line 53 of file ArticulatedLink.cpp. References cos2, cosTheta, sin2, sinCos, sinTheta, and theta. Referenced by ArticulatedLimb::addOneObjectLink(), and ArticulatedAgentQuasistatic::forwardKinematics(). |
|
|
Delete the contacts of the object. Reimplemented from PhysicalObject. Definition at line 65 of file ArticulatedLink.h. References PhysicalObject::deleteContacts(), force, Vector2::setToZero(), and torqueContact. |
|
|
Definition at line 98 of file ArticulatedLink.cpp. References real, theta, theta0Max, and torqueContact. |
|
|
Calls the draw method for the member objects. Reimplemented from ComposedPhysicalObject. Definition at line 106 of file ArticulatedLink.cpp. References ComposedPhysicalObject::draw(), GUI::drawCircle(), real, GUI::setPenColor(), Vector2::x, and Vector2::y. Referenced by ArticulatedLimb::draw(). |
|
||||||||||||
|
Does nothing. The contact matrix filling for links is performed in ArticulatedAgent::forwardAccelerations. Reimplemented from PhysicalObject. Definition at line 61 of file ArticulatedLink.h. |
|
|
Advances the time to the next timestep. A further call to forward kinematics is needed for updating the global coordinates. Reimplemented from ComposedPhysicalObject. Definition at line 33 of file ArticulatedLink.cpp. References Integrator::integrate(), theta, thetaD, and thetaOld. Referenced by ArticulatedAgentQuasistatic::integrate(). |
|
|
Normalizes theta to the interval (-Pi,Pi) around theta0 Definition at line 38 of file ArticulatedLink.cpp. |
|
|
Rolls back the time to the previous timestep. Reimplemented from ComposedPhysicalObject. Definition at line 44 of file ArticulatedLink.h. References ComposedPhysicalObject::rollback(), and theta. Referenced by ArticulatedAgentQuasistatic::rollback(). |
|
|
Definition at line 61 of file ArticulatedLink.cpp. References childLinks. Referenced by ArticulatedLimb::addOneObjectLink(). |
|
|
A list of child links. The list does NOT own the links. It should NOT delete the child links on destruction. Definition at line 125 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::backwardDynamics(), ArticulatedAgentQuasistatic::computeTotalForces(), and setParentLink(). |
|
|
The Coriolis force. Definition at line 96 of file ArticulatedLink.h. |
|
|
Functions of theta Definition at line 93 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::backwardDynamics(), and computeSinCos(). |
|
|
Functions of theta Definition at line 93 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::backwardDynamics(), computeSinCos(), ArticulatedAgentQuasistatic::computeTotalForces(), and ArticulatedAgentQuasistatic::forwardAccelerations(). |
|
|
The maximum permitted displacement relative to the equilibrium position of the link Definition at line 108 of file ArticulatedLink.h. Referenced by ArticulatedLink(). |
|
|
Damping factor of the link articulation Definition at line 115 of file ArticulatedLink.h. Referenced by ArticulatedLink(). |
|
|
The force that is exercited on the link by its parent link, in laboratory reference system. Definition at line 81 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::computeBodyDerivatives(), ArticulatedAgentQuasistatic::computeDerivatives(), computeForceQuasistatic(), ArticulatedAgentQuasistatic::computeTotalForces(), and deleteContacts(). |
|
|
The force that is exercited on the link by its parent link, in link reference system. Definition at line 83 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::computeTotalForces(). |
|
|
Determines whether the torque should be computed as an elastic torque given by theta and theta0 (if true) or whether the torque is given at each timestep (if false) Definition at line 52 of file ArticulatedLink.h. Referenced by ArticulatedLimb::addOneObjectLink(). |
|
|
Elastic constant of the link articulation Definition at line 113 of file ArticulatedLink.h. Referenced by ArticulatedLink(), Iunctus::build(), and computeMotorTorque(). |
|
|
Length of the link along its x axis Definition at line 118 of file ArticulatedLink.h. Referenced by ArticulatedLimb::addOneObjectLink(), ArticulatedAgentQuasistatic::backwardDynamics(), ArticulatedAgentQuasistatic::computeTotalForces(), ArticulatedAgentQuasistatic::forwardAccelerations(), and ArticulatedAgentQuasistatic::forwardKinematics(). |
|
|
The motor torque applied at the link joint Definition at line 110 of file ArticulatedLink.h. Referenced by ArticulatedLink(), ArticulatedAgentQuasistatic::backwardDynamics(), computeMotorTorque(), ArticulatedAgentQuasistatic::computeTotalForces(), and ArticulatedAgentQuasistatic::forwardAccelerations(). |
|
|
The parent link. Definition at line 121 of file ArticulatedLink.h. Referenced by ArticulatedLink(), ArticulatedAgentQuasistatic::forwardAccelerations(), and ArticulatedAgentQuasistatic::forwardKinematics(). |
|
|
Functions of theta Definition at line 93 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::backwardDynamics(), and computeSinCos(). |
|
|
Functions of theta Definition at line 93 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::backwardDynamics(), and computeSinCos(). |
|
|
Functions of theta Definition at line 93 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::backwardDynamics(), computeSinCos(), ArticulatedAgentQuasistatic::computeTotalForces(), and ArticulatedAgentQuasistatic::forwardAccelerations(). |
|
|
The rotation angle of the link relative to the coordinate system of the predecessor link. It is the generalized coordinate of the link. Definition at line 89 of file ArticulatedLink.h. Referenced by ArticulatedLimb::addOneObjectLink(), ArticulatedLink(), computeMotorTorque(), computeSinCos(), detectTorqueContact(), ArticulatedAgentQuasistatic::forwardKinematics(), integrate(), normalizeTheta(), Iunctus::proprioception(), and rollback(). |
|
|
The equilibrium position of the link, commanded by the motor neurons Definition at line 104 of file ArticulatedLink.h. Referenced by ArticulatedLimb::addOneObjectLink(), ArticulatedLink(), Iunctus::build(), Iunctus::controll(), and normalizeTheta(). |
|
|
Minimum and maximum values of theta0 Definition at line 106 of file ArticulatedLink.h. Referenced by ArticulatedLink(), Iunctus::build(), Iunctus::controll(), detectTorqueContact(), and Iunctus::proprioception(). |
|
|
Minimum and maximum values of theta0 Definition at line 106 of file ArticulatedLink.h. Referenced by ArticulatedLink(), Iunctus::build(), Iunctus::controll(), and Iunctus::proprioception(). |
|
|
Temporal derivate of theta Definition at line 99 of file ArticulatedLink.h. Referenced by ArticulatedLink(), ArticulatedAgentQuasistatic::computeDerivatives(), ArticulatedAgentQuasistatic::forwardAccelerations(), and integrate(). |
|
|
Definition at line 101 of file ArticulatedLink.h. Referenced by ArticulatedLink(). |
|
|
Definition at line 90 of file ArticulatedLink.h. Referenced by integrate(). |
|
|
Definition at line 64 of file ArticulatedLink.h. Referenced by ArticulatedLink(), ArticulatedAgentQuasistatic::backwardDynamics(), deleteContacts(), detectTorqueContact(), and ArticulatedAgentQuasistatic::forwardAccelerations(). |
|
|
The total force that is exercited on the link, in laboratory reference system. Definition at line 85 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::computeTotalForces(). |
|
|
The total torque that acts on the link, relative to its reference point. Definition at line 79 of file ArticulatedLink.h. Referenced by ArticulatedAgentQuasistatic::computeTotalForces(). |
Thyrix homepage • Users' guide
(C) Arxia 2004-2005